
Hitro polnjenje in samogradnja? Do nedavno to nekako ni spadalo skupaj. Seveda se temu izzivu nisem mogel upreti. Imam predelavo z HV sistemom 104S. Ko sem veliko prebral iz različnih virov, sem se odločil, da je čas za nadgradnjo. Želel sem si hitro polnjenje za ta dolga potovanja po Sloveniji in Hrvaški. Kdo ve, morda bom nekoč šel obiskat Johannesa tudi v Kassel.
Najprej sem prebral o Damienovem delu in videl njegove videoposnetke, ki so me navdihnili k temu.
Na voljo je veliko videoposnetkov, zato ne bom več objavljal. Iz tega videa sem pridobil znanje, da je DIY CHADEMO mogoč. Zasnova Openinverter se je začela na arhitekturi Arduino DUE s procesorjem SAM3X in ploščo Nissan Leaf VCU.
Isaac Kelly je dopolnil programsko opremo, zaradi česar je ta plošča VCU postala veliko bolj uporabna.
https://www.electricboxster.com/open-chademo
https://www.diyelectriccar.com/threads/new-open-source-chademo-system.203760/
Shema napeljave in programska oprema se nahajata tukaj:
https://github.com/damienmaguire/Chademo-Fast-Charge-Controller
Trenutno je Damien prešel na STM32 zaradi drugih projektov z istim krmilnikom VCU.

Glavna ideja nove revizije je uporaba tokovnega senzorja ISA shunt, ki je tokovni senzor na osnovi CAN z zaznavanjem napetosti. To je res uporaben predmet. Lahko prenaša napetost, tok, Ah, Wh, SOC % itd…
Različne modele istega senzorja uporabljajo tudi proizvajalci različnih električnih avtomobilov predvsem za hitro polnjenje.
Več podatkov o napravi lahko najdete v naslednjem linku.
V mojem primeru ga uporabljam za prenos dejanskih podatkov o toku in napetosti. Ti podatki gredo po CAN vodilu v Leaf VCU enoto, kjer se prenesejo v poročilo o toku in napetosti na zahtevo Chademo polnilnice.
Zelo dobro bi ga lahko uporabljal tudi kot glavni SOC in ampermeter v katerem koli EV avtomobilu.
Seveda pride iz tovarne neinicializiran. Ta postopek na wikiju opisuje, kako pripraviti ISA shunt za uporabo z DIY krmilnikom. Zraven je tudi nekaj P/N priključkov in pinov.
Od Damiena sem dobil ploščo Leaf VCU in nabavil škatlo s konektorjem. Na ta konektor sem namestil žice po shemi.
Če želite VCU uporabiti za krmilnik CHADEMO, je za pravilno delovanje potrebna ena sprememba. Ker so vhodi zaščiteni z delilniki napetosti, sem moral za zaznavanje signala odstraniti upor R17 (pulldown za IN2/D7), da je lahko zanesljivo zaznal, kdaj pin 10 potegne proti GND. Shema napeljave:
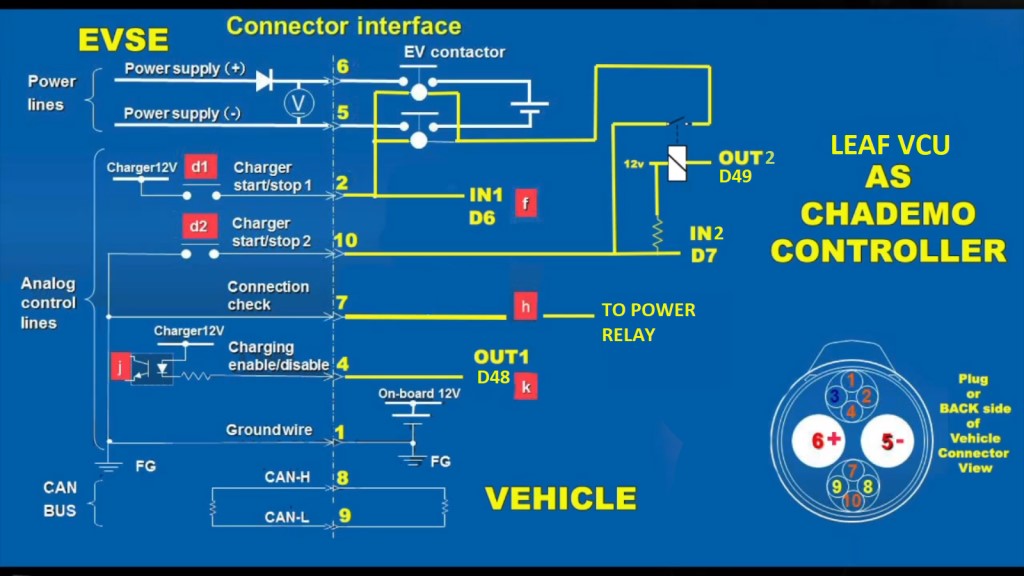
Pin 5 in 6 sta glavna VN kontaktorja
Pin 1 je GND
Pin 2 in 10 sta pozitivna in negativna stran tuljav kontaktorja
Pin 7 je pilotni zatič, ki zagotavlja, da je vstavljen informacijski konektor
Pin 4 je pin za omogočanje za VCU
Nožica 8 in 9 sta vodilo Chademo CAN
Ko Pin 7 zazna, da je priključek GND prisoten, zagotavlja 12V na VCU prek releja. Ko se to zgodi, bo pin D48 signaliziral omogočeno in vodilo CAN se zažene. VCU opazuje pin D6 za prisotnost 12 V in na D7 za GND. Zato potrebuje 1K pullup na 12V. Kontaktorji se zaprejo, ko je pogoj izpolnjen.
Vse skupaj sem sestavil v inox škatlo, ki jo nameravam namestiti pod avto namesto izpušnega lonca. Ideja je, da je ta škatla samostojna in da bodo samo visokonapetostne žice potovale nazaj do baterije. 12V napajanje senzorja bo dobavljal izoliran LED napajalnik cca 2A.
Po shemi bo deloval samo takrat, ko bo HV kabel priklopljen.

12V napeljavo vkljapljamo z dvema relejema, ki zagotavljata 12V napajanje ISA shuntu in Leaf VCU v trenutku, ko je vtič chademo vstavljen. Tukaj uporabljam avtomobilskih 12V za napajanje mojega VCU, vendar bom sčasoma uporabil tiste 12V LED napajalnik, saj lahko delujejo do 420Vdc.
Ko so izpolnjeni vsi pogoji v skladu s shemo, bo drugi rele vklopil +/- kontaktorje in signaliziral vodilo CAN.
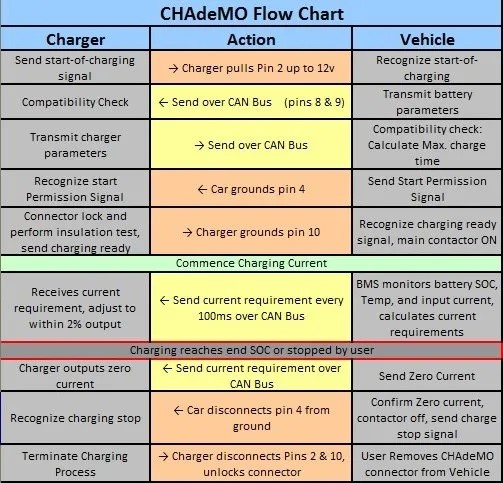
Šel sem na EVSE in poskušal sprožiti prisotnost vtikača. Dobil sem dober rezultat. Po vstavitvi vtiča je majhen rele vklopil 12V napajanje na VCU in kontaktorje. Nato je čez nekaj časa EVSE ukazal odpreti kontaktorje.
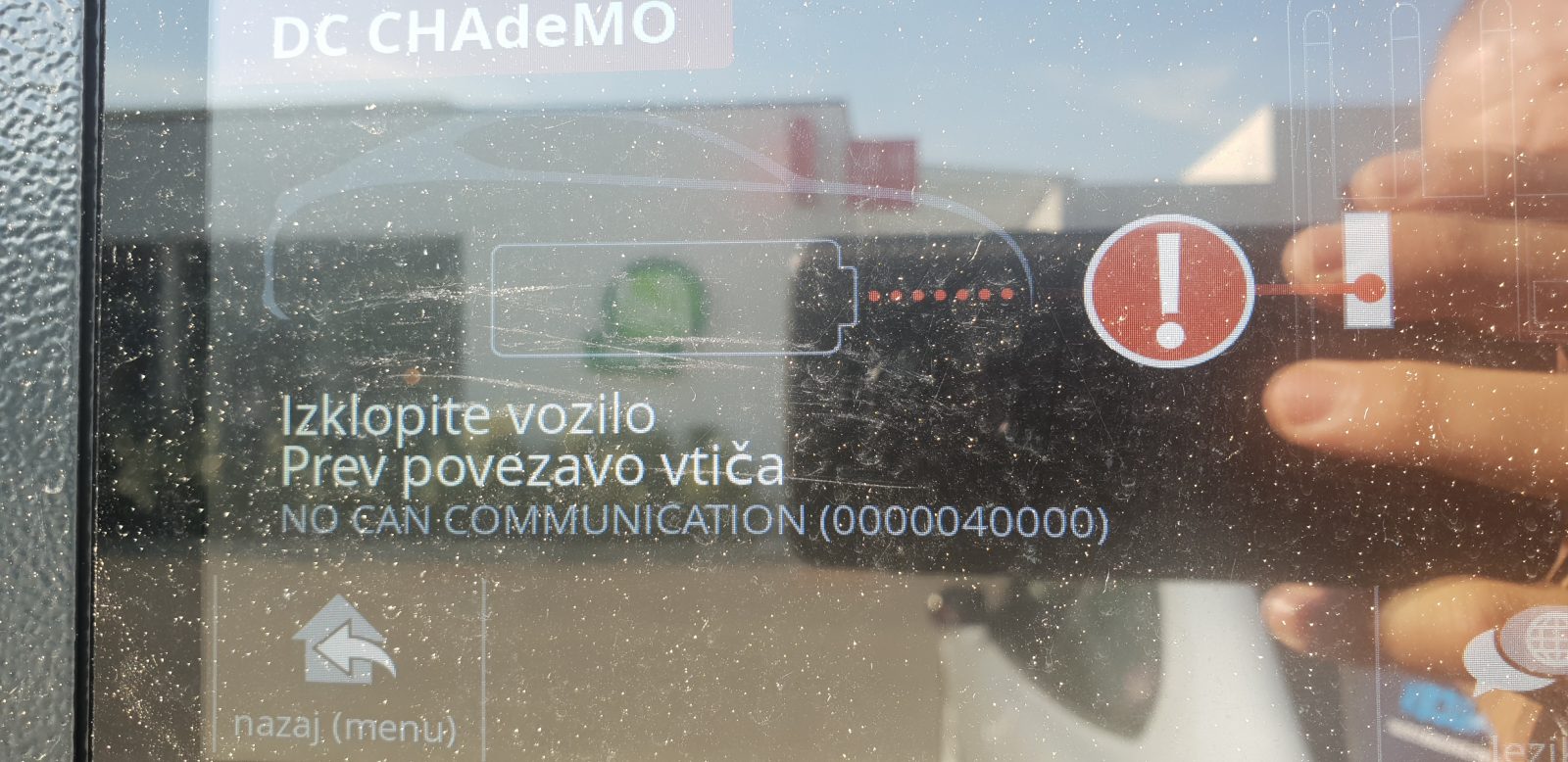
Tukaj sem moral malo spremeniti svojo kodo. Najprej sem moral vstaviti ukaz za izbiro tipa ID pred vsakim prenosom CAN. ID signala sem spremenil na normalno (ne podaljšano).
outframe.extended = 0; // Extended addresses 0=11bit 1=29bit
To je odprlo kontaktorje in dalo nekaj sekund polnjenja. Nato je EVSE zaprl. Ko sem opazoval poročila o odpravljanju napak iz kode VCU, sem opazil, da sta napetost in tok pozitivno definirani. Mogoče mora EVSE videti negativno poročilo za preračunavanje?
JLD505: 402.313v -0.01A 0.0Ah 0.0kW 0.0kWh OUT1:1 OUT2:0 OUT3:0 IN1:1 IN2:1CHG T: 5
Chademo Mode: 4
CAR: Protocol:1 Target Voltage: 420 Current Command: 0 Target Amps: 79 Faults: 0 Status: 1 kWh: 0.00 Time:0:1:5.544
EVSE: MaxVoltage: 500 Max Current:80 Threshold Voltage:0 Time:0:1:5.567
EVSE: Measured Voltage: 0 Current: 0 Time remaining: 0 Status: 110010 Time:0:1:5.572
Stopping chademo process.
EVSE: MaxVoltage: 500 Max Current:80 Threshold Voltage:0 Time:0:1:5.667
EVSE: Measured Voltage: 0 Current: 0 Time remaining: 0 Status: 110010 Time:0:1:5.672
EVSE: MaxVoltage: 500 Max Current:80 Threshold Voltage:0 Time:0:1:5.767
EVSE: Measured Voltage: 0 Current: 0 Time remaining: 0 Status: 110010 Time:0:1:5.772
EVSE:fault code 32 Abort.
V knjižnici ISA je ukazno navodilo za spremembo orientacije senzorjev.
| 12
3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
void ISA::CMINUS(){
firstframe=false; STOP(); delay(700); for(int i=0;i<9;i++) { Serial.println(“set current minusn”); outframe.id = 0x411; // Set our transmission address ID outframe.length = 8; // Data payload 8 bytes outframe.extended = 0; // Extended addresses 0=11-bit1=29bit outframe.rtr=1; //No request outframe.data.bytes[0]=0x20; // 20 is designation for current sensor outframe.data.bytes[1]=0xC2; // for other direction use 42 outframe.data.bytes[2]=0x02; outframe.data.bytes[3]=0x00; outframe.data.bytes[4]=0x00; outframe.data.bytes[5]=0x00; outframe.data.bytes[6]=0x00; outframe.data.bytes[7]=0x00; canPort->sendFrame(outframe); if(debug)printCAN(&outframe); delay(500); sendSTORE(); delay(500); } // delay(500); START(); delay(500); lastAs=As; lastWh=wh; } |
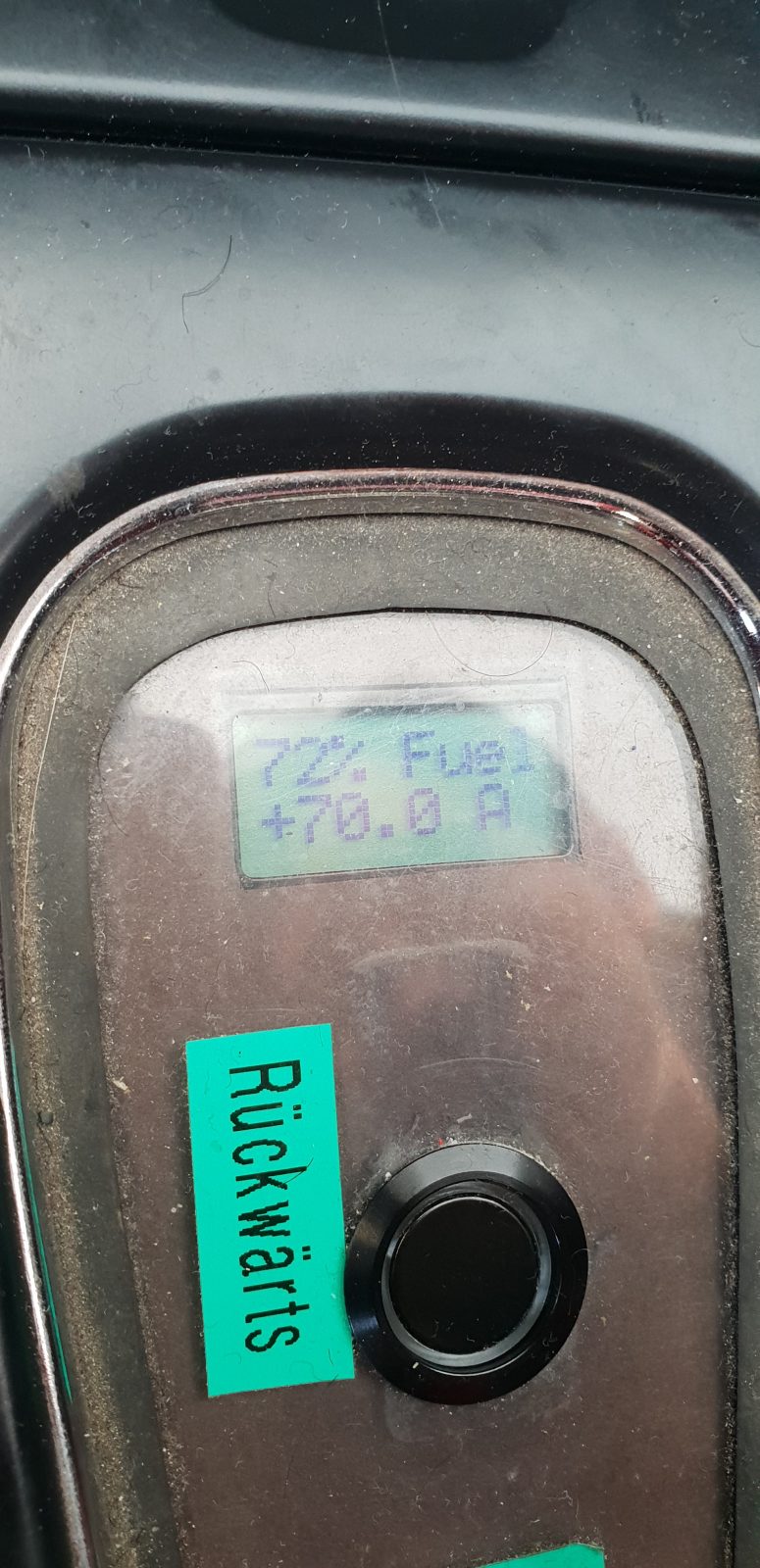
Ko sem to spremenil poziv v kodi, sem ukazal drugo smer iz serijskega vmesnika in nenadoma sem lahko polnil!
JLD505: 411.157v -46.26A 5.1Ah 19.0kW 2.1kWh OUT1:1 OUT2:1 OUT3:1 IN1:1 IN2:0 CHG T: 190
Chademo Mode: 6
EVSE: MaxVoltage: 500 Max Current:47 Threshold Voltage:420 Time:0:7:51.212
EVSE: Measured Voltage: 410 Current: 45 Time remaining: 5220 Status: 101 Time:0:7:51.214
CAR: Charging Time Time:0:7:51.260
EVSE: MaxVoltage: 500 Max Current:47 Threshold Voltage:420 Time:0:7:51.312
EVSE: Measured Voltage: 410 Current: 45 Time remaining: 5220 Status: 101 Time:0:7:51.315
CAR: Protocol:2 Target Voltage: 420 Current Command: 46 Target Amps: 46 Faults: 0 Status: 1 kWh: 2.07 Time:0:7:51.338
CAR: Absolute MAX Voltage:420 Pack size: 43.00 Time:0:7:51.411
EVSE: MaxVoltage: 500 Max Current:47 Threshold Voltage:420 Time:0:7:51.414
EVSE: Measured Voltage: 410 Current: 45 Time remaining: 5220 Status: 101 Time:0:7:51.416
CAR: Charging Time Time:0:7:51.485
EVSE: MaxVoltage: 500 Max Current:47 Threshold Voltage:420 Time:0:7:51.512
EVSE: Measured Voltage: 410 Current: 45 Time remaining: 5220 Status: 101 Time:0:7:51.514
CAR: Protocol:2 Target Voltage: 420 Current Command: 46 Target Amps: 46 Faults: 0 Status: 1 kWh: 2.07 Time:0:7:51.563
EVSE: MaxVoltage: 500 Max Current:47 Threshold Voltage:420 Time:0:7:51.612
EVSE: Measured Voltage: 410 Current: 45 Time remaining: 5220 Status: 101 Time:0:7:51.614
CAR: Absolute MAX Voltage:420 Pack size: 43.00 Time:0:7:51.636
JLD505: 411.182v -46.26A 5.1Ah 19.0kW 2.1kWh OUT1:1 OUT2:1 OUT3:1 IN1:1 IN2:0 CHG T: 190
Preizkusil sem ta sistem in je deloval na dveh vrstah polnilnih postaj CHADEMO. Škatlo sem imel v prtljažniku, ker je to najlažje testirati s priključenim 12V napajanjem.


Medtem ko sem testiral z ABB EVSE, sem dobil idejo, da priključim vtič Level 2 tudi na svoje polnilnike! Pričakoval sem, da bo EVSE zmanjšal hitrost polnjenja, vendar NE! Dobil sem dobrih 9 kW iz vtiča L2 in 17 kW iz CHADEMO za 26.

Glede uspeha na dveh EVSE s polno izkoriščeno močjo sem šel na postaje, ki so bile komercialne in zahtevajo nekaj več kot drugi EVSE. V prihodnosti bom poskušal dešifrirati, kaj potrebujejo, da bom lahko polnil na avtocesti.
Preizkusil sem še en EVSE. Tokrat Ionity. Dobil sem 80A izhod = 30kW in EVSE je izjavil, da je sposoben dobaviti 50kW. Preden lahko dostopam do takšne moči, moram zgraditi nekakšen hladilni sistem.

Po preizkušanju sem v škatlo vgradil 12V 3A LED napajalnik za DIN letev. Pred vgradnjo sem ga pregledal zaradi ratinga komponent na vhodu. Tako sem ugotovil, da ima vgrajen vhodni kondenzator 47uF 400Vdc, kar je premalo za moj sistem, ki lahko gre tudi do 420Vdc. Zato sem zamenjal kondenzator z močnejšim, ki zmore preživeti napetost do 450Vdc, kar bo moralo zadostovati.
Po preizkusu napajalnika sem zadevo vgradil in priklopil v napajanje VCU enote in kontaktorjev. Nastavil sem napetost na 13,7V, kar je nekako splošna napetost v avtu. Seveda sem moral tudi povezati ohišje škatle z avtom in hkrati v notranjosti povezati minus napajanje na ohišje. Polnilnica je zelo zahtevna glede tega.
Na ta način sem pridobil polnilni modul, ki je samo z VN kabli povezan na avtu in seveda z kablom na maso, kar pa je gradbena zahteva za ničenje vseh modulov v avtu.
Leave a Reply
You must be logged in to post a comment.